|
�������әCе������

�����������әCе����Ҫ�Ɉ��ЙC�����әC���Ϳ���ϵ�y���ֽM�ɡ�
�����ֲ����Á�ץ�ֹ������ߣ��IJ�����������ץ��������Π�ߴ硢���������Ϻ����IҪ����ж�
�N�Y����ʽ����A���͡��г��ͺ������͵ȡ��\�әC����ʹ�ֲ���ɸ��N�D�ӣ��[�ӣ����Ƅӻ�ͺ��\�Ӂ�
���FҎ���Ą�������׃��ץ�������λ�ú��˄ݡ��\�әC������������s�����D�Ȫ����\�ӷ�ʽ���Q��Cе
�ֵ����ɶ� ������
����ץȡ���g������λ�úͷ�λ�����w������6�����ɶȡ����ɶ��ǙC е���OӋ���P �I����
������ ��Խ�࣬�Cе�ֵ��`����Խ��ͨ����Խ�V����Y��ҲԽ���s��һ�㌣�ÙCе����2��3�����ɶȡ���
��ϵ�y��ͨ�^���Cе��ÿ�����ɶȵ�늙C�Ŀ��ƣ�������ض�������ͬ�r���Ղ�������������Ϣ���γɷ���
���]�h���ơ�����ϵ�y�ĺ���ͨ�����Ɇ�Ƭ�C��dsp������оƬ���ɣ�ͨ�^���侎�̌��F��Ҫ���ܡ�

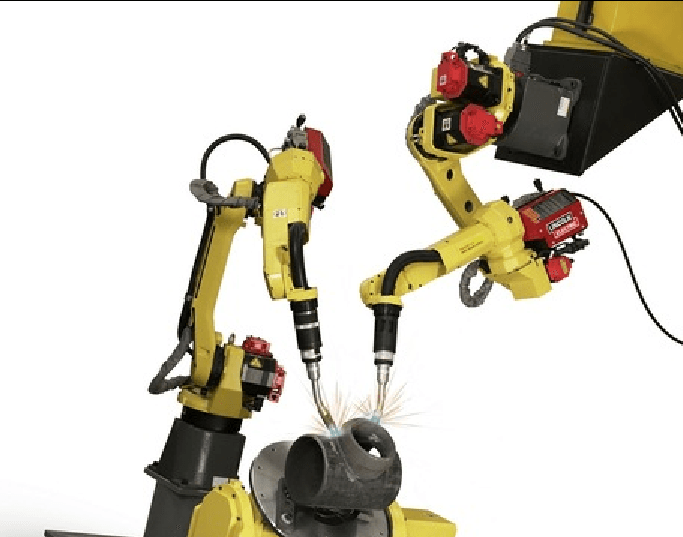
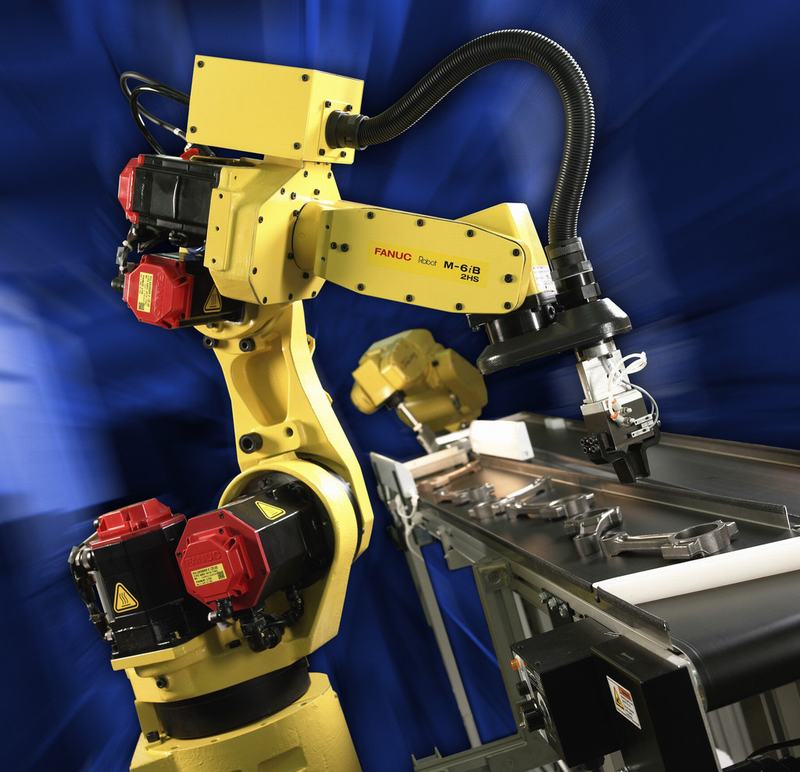
ȫ���N��ɭ�_���әC���ˣ��C���˺���ƽ�_���ṩ�����әC�����ԄӺ��ӹ���վ����Q������
�������әCе��-ɭ�_���I���I�ṩ�C���˺��ӣ� ���аl���OӋ�����a�cһ�w�����I����Ч��
�͑�Ҋ�C�Ƿ�Ʒ�|��

�aƷֱͨ܇��
�������I�C���ˈԳ��aƷ�ļ��g��������
����ÿһλ�Ñ��õ��õĮaƷ
Ҳ�S�D�࣬���҂���Ȼ����Ŭ�����ڸ�׃
�Ñ��w��_���ٷְٵĘO�£�ÿ���������I�C�����ԃ��|����
�پW��www.hdsyr.cn ȫ���ᾀ��400-106-2369
 |